
Robot breekt geen Paasei

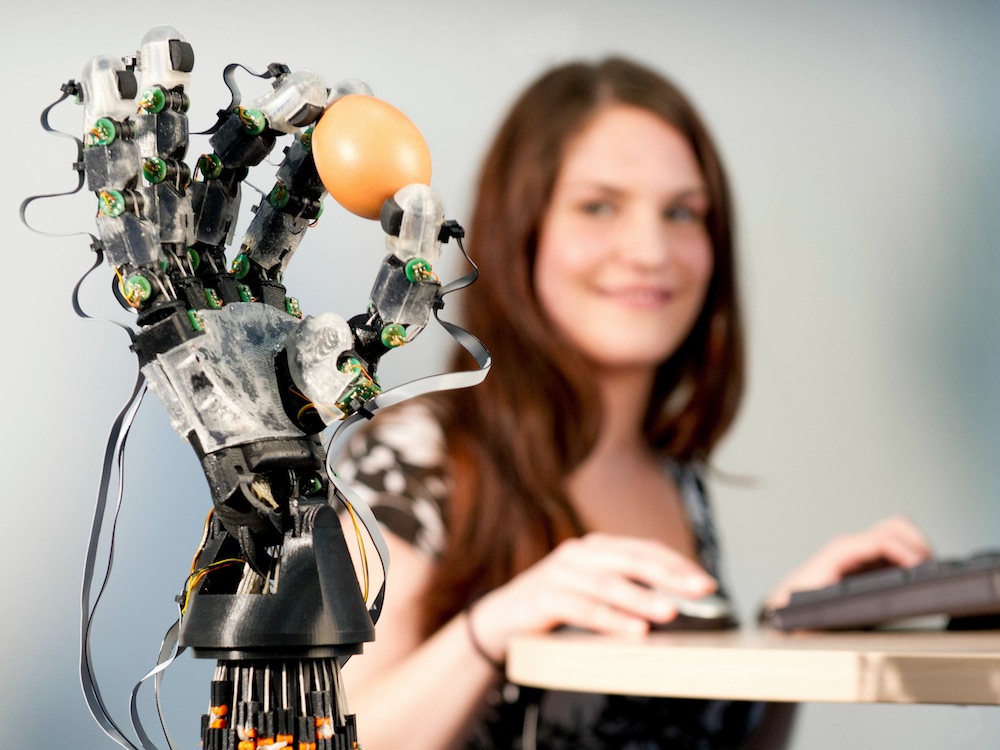
De komende Paasdagen worden weer miljoenen eieren verorberd. Ongetwijfeld zullen hier en daar eieren worden kapot gedrukt tussen enkele al te ijverige of te haastige vingers. Dat gebeurt niet bij de onderzoekers van de universiteit van Saarland. Zij hebben een robotgrijper ontwikkeld die zelfs de meest kwetsbare voorwerpen zorgvuldig vastpakt.
Menselijke hand
Het concept van deze robothand hebben ze al eens op der Hannover Messe getoond, waar de Universiteit van Saarland dit jaar ook weer met innovaties komt. De ontwikkeling van de robothand hebben ze samen met onderzoekers uit Bologna en Napels gedaan. Ze hebben zich laten inspireren door de menselijke arm. Via kleine elektromotoren worden dunne, verdraaide kabels aangedreven die de verschillende onderdelen van de vingers aandrijven. De totale robothand wordt geregeld via sensoren, die voelen wanneer er voldoende druk is opgebouwd om een voorwerp vast te pakken.
5 kilo last
De polymeerdraaden van slechts 20 centimeter laten de robothand een last van 5 kilo in enkele seconden 30 millimeter optillen. De compacte elektromotoren draaien met hoge toerentallen, maar met zeer lage koppels, amper 5 Newtonmillimeter. “De robothand lijkt daardoor zoveel op de menselijke hand, dat het moment om deze in te zetten in bijvoorbeeld industriële toepassingen steeds dichterbij komt”, zegt Chris May, een van de Duitse onderzoekers in dit Europees project.
Denk je deze robothand eens in op de twee-armige Yaskawa robot uit de cel die Robomotive onlangs op de Techni-Show liet zien?
De robothand is ontwikkeld in het kader van het Europees onderzoeksproject DEXMART. Kijk hier voor meer informatie.




